_ _ _ /_\ _ _ __ _ ___ /_\__ __ ___ _ (_) / _ \| ' \/ _` (_-< / _ \ V V / ' \| | /_/ \_\_||_\__,_/__/ /_/ \_\_/\_/|_||_|_|
أنس عوني
anas@fanar:~$ ▌
name : Anas Awni · أنس عوني role : Software Engineer / Data Engineer · Scientist domains : MLOps · (3D) computer vision · generative AI stack : Python · full chain → ./stack.sh currently : architecting the MLOps of Fanar Arabic GenAI contact : analnuaimi@hbku.edu.qa socials : ├── github github.com/TUMAAA ├── linkedin linkedin.com/in/anasaa ├── scholar scholar.google.com/anasaa └── medium medium.com/@anas.alnuaimi
anas@fanar:~$ cat about.md
# About In my day-to-day business I am somewhere between research code and production data pipelines — mostly enjoying Software Engineering as a craft while it has not been killed yet through our unwavering quest to make ourselves Skynet's prey! Prior to that I was concerned proving to my advisor I deserve a PhD through working on 3D Computer Vision. ## what I work on - MLOps for Fanar — building MLOps solutions for Fanar Arabic GenAI, addressing Effective Data Management, Data Analytics, Data-Training- Deployment Pipelines, and production-grade code. - (3D) Computer Vision — worked on the alignment problem of partially-overlapping 3D point clouds during my PhD. - Humanitarian AI — Computer Vision for remote-sensing data for disaster analysis. ## philosophy > Only reviewed code is good code. I like clear terminology, people who look at code as the outcome of Software Engineering — not "coding" or "programming" — and people who don't consider science a source for fame but rather a mission to deliver societal impact.
anas@fanar:~$ ./stack.sh
[+] resolving toolchain... [+] 5 layers loaded · 0 errors · YMMV == Programming Languages == // as long as it still matters Python · Scala · C++ // also did C# once upon a time, but Claude beats me to it 100× ;( // there was a time when I considered Matlab a programming language // (feeling ashamed). It is nonetheless a super powerful engineering tool. == Orchestration == pipeline frameworks : Airflow · Kubeflow · AWS Step Functions containers / cluster : Kubernetes · SLURM == Databases == PostgreSQL · SQLite · Elasticsearch · OpenSearch · AWS RDS / DynamoDB == DevOps == CI / CD : Zuul CI · Jenkins deployment : Docker · Ansible == Big Data == Spark · HDFS · MapR [✓] stack initialized. mount points ready.
anas@fanar:~/publications$ ls -la | sort -k citations -r
citations : 487
h-index : 10
i10-index : 10
// canonical source: scholar.google.com/citations?user=APUSJ6UAAAAJ
JOURNAL
2011Mobile visual location recognition★ 153
G Schroth, R Huitl, D Chen, M Abu-Alqumsan, A Al-Nuaimi, E Steinbach
IEEE Signal Processing Magazine
Phone snaps a photo → image-retrieval against a geo-tagged database returns your location. GPS-free urban localization from pixels alone.

CONFERENCE
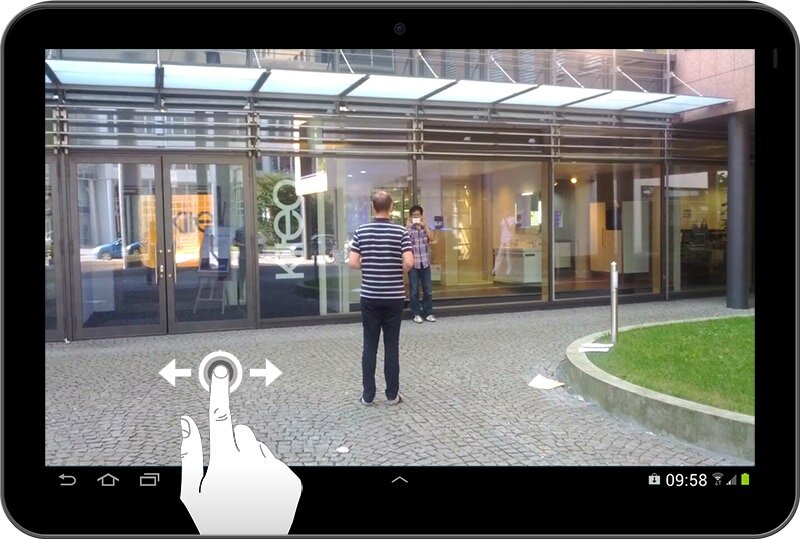
—Point Cloud-based Model-mediated Teleoperation with Dynamic and Perception-based Model Updating★ 89
X Xu, B Cizmeci, A Al-Nuaimi, E Steinbach
—
Stream a 3D point-cloud model of a remote scene to a haptic operator. Perception updates the model on the fly so teleop stays low-latency.
JOURNAL
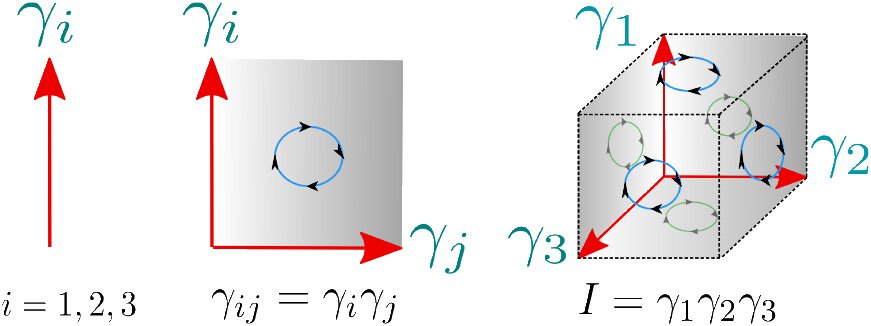
2016Geometric-Algebra LMS Adaptive Filter and its Application to Rotation Estimation★ 41
WB Lopes, A Al-Nuaimi, CG Lopes
IEEE Signal Processing Letters
Reformulates the classical LMS adaptive filter in Clifford / geometric algebra — a clean online way to estimate 3D rotations from streaming data.
CONFERENCE
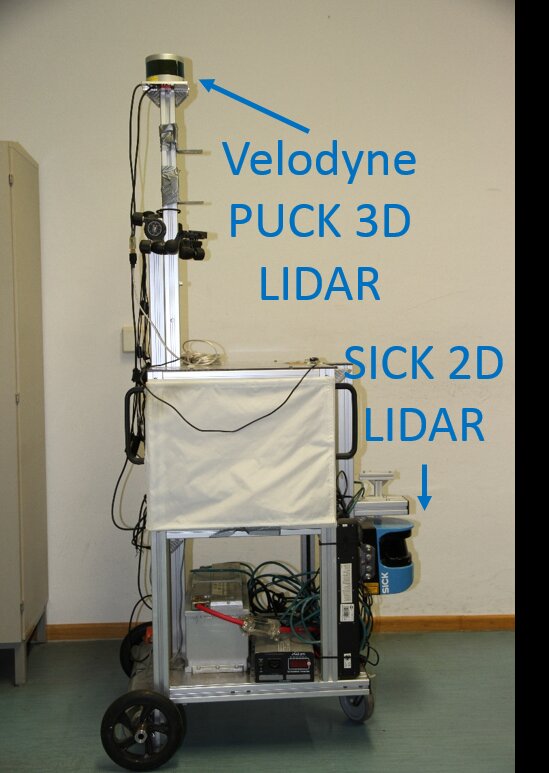
2016Analyzing LiDAR scan skewing and its impact on scan matching★ 28
A Al-Nuaimi, W Lopes, P Zeller, A Garcea, C Lopes, E Steinbach
International Conference on Indoor Positioning and Indoor Navigation (IPIN)
A rotating LiDAR distorts its own scan whenever the platform is moving. The paper quantifies the effect and compensates for it during scan matching.
CONFERENCE
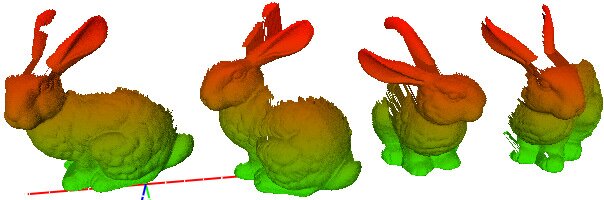
20166DOF point cloud alignment using geometric algebra-based adaptive filtering★ 28
A Al-Nuaimi, E Steinbach, WB Lopes, CG Lopes
IEEE Winter Conference on Applications of Computer Vision (WACV)
Drives the geometric-algebra LMS filter to estimate full 6-DOF rigid alignment (rotation + translation) between two overlapping point clouds.
WORKSHOP
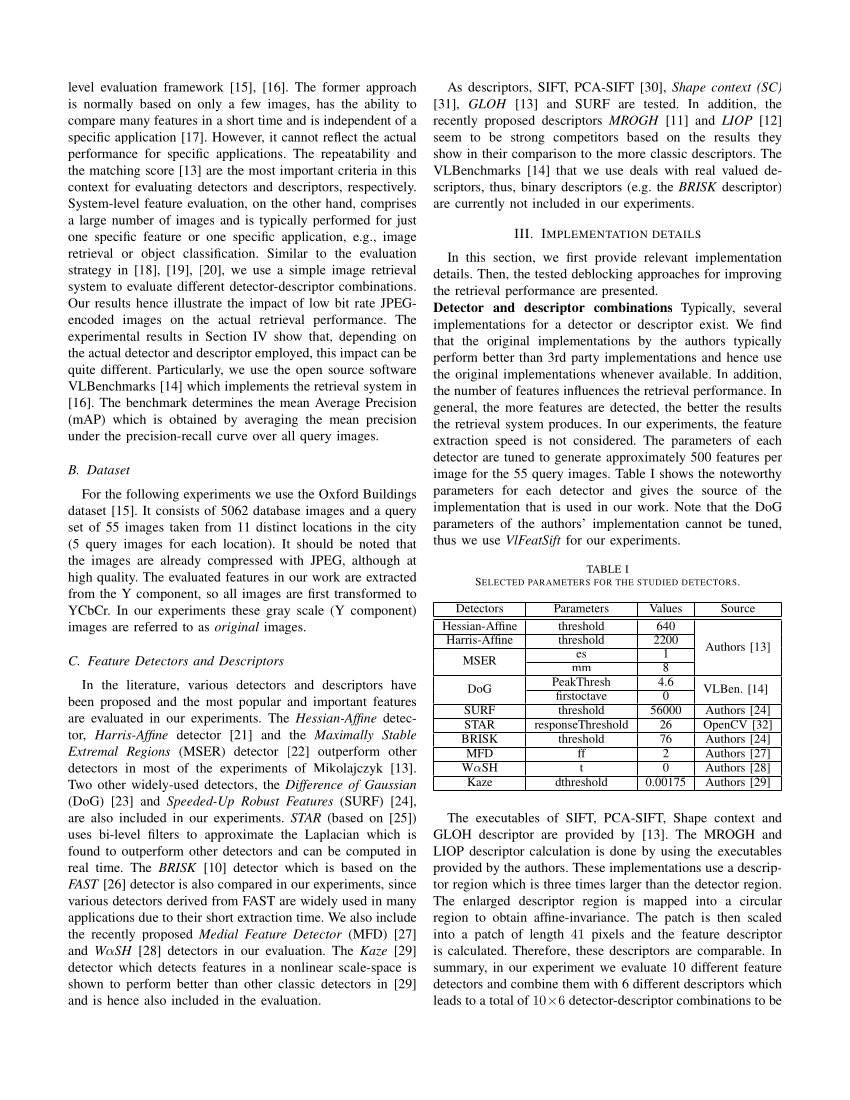
2013Performance comparison of various feature detector-descriptor combinations for content-based image retrieval with JPEG-encoded query images★ 28
J Chao, A Al-Nuaimi, G Schroth, E Steinbach
IEEE 15th International Workshop on Multimedia Signal Processing
Benchmarks SIFT / SURF / ORB / BRISK / FREAK on heavily JPEG-compressed queries — what survives the bandwidth squeeze for mobile image retrieval?
PATENT
2017Visual localization method★ 27
E Steinbach, G Schroth, M Abu-Alqumsan, R Huitl, A Al-Nuaimi
US Patent 9,641,981
US patent covering the end-to-end mobile visual-place-recognition pipeline: device-side query, server-side index, location response.
CONFERENCE
2011Rapid image retrieval for mobile location recognition★ 21
G Schroth, A Al-Nuaimi, R Huitl, F Schweiger, E Steinbach
IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP)
Real-time variant of the localization pipeline — vocabulary-tree quantization + geometric verification fast enough to run on a phone.

JOURNAL
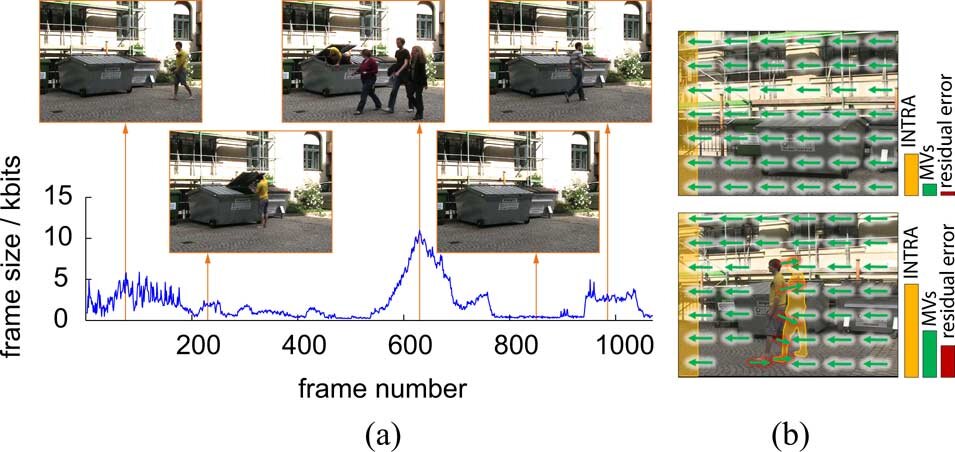
2012Fully automatic and frame-accurate video synchronization using bitrate sequences★ 11
F Schweiger, G Schroth, M Eichhorn, A Al-Nuaimi, B Cizmeci, M Fahrmair
IEEE Transactions on Multimedia
Syncs multiple video streams frame-accurately by cross-correlating their per-frame bitrate signatures. No audio fingerprint required.
WORKSHOP
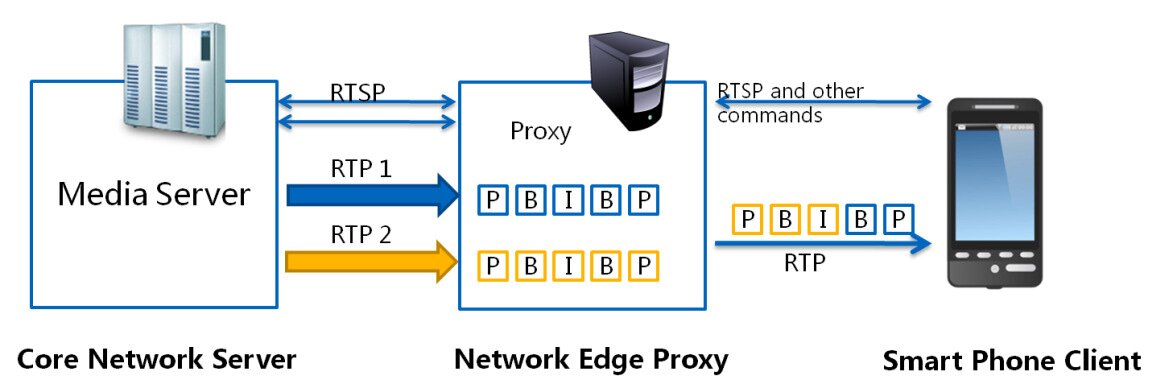
2012Seamless and efficient stream switching of multi-perspective videos★ 10
H Zhang, A Al-Nuaimi, X Gu, M Fahrmair, R Ishibashi
International Packet Video Workshop
Streams multiple camera angles simultaneously and switches viewpoint without rebuffering — useful for live sports, concerts, 360° playback.
DISSERTATION
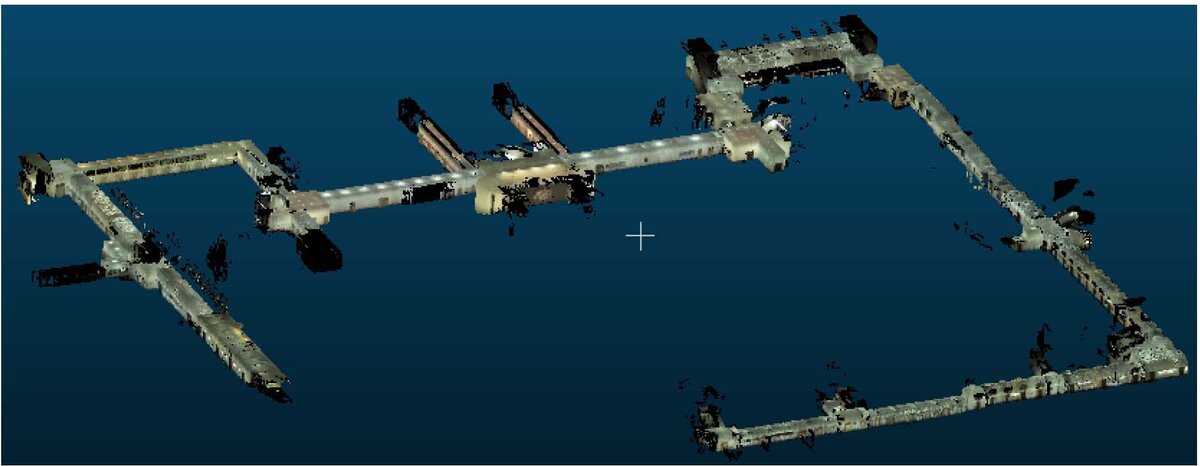
2017Methods of Point Cloud Alignment with Applications to 3D Indoor Mapping and Localization★ 7
A Al-Nuaimi
PhD Dissertation · Technische Universität München
The full PhD thesis: methods for aligning 3D point clouds, applied to indoor mapping and localization at building scale.
WORKSHOP
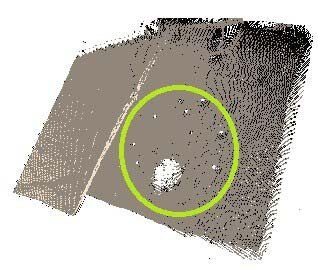
2015Indoor location retrieval using shape matching of KinectFusion scans to large-scale indoor point clouds★ 7
A Al-Nuaimi, M Piccolrovazzi, S Gedikli, E Steinbach, G Schroth
Eurographics Workshop on 3D Object Retrieval
Localize a small KinectFusion scan inside a much larger pre-built 3D map of a building, using shape descriptors and geometric matching.
CONFERENCE
2013Towards the design of an intuitive multi-view video navigation interface based on spatial information★ 6
S Apostu, A Al-Nuaimi, E Steinbach, M Fahrmair, X Song, A Möller
Mobile HCI · ACM
UI study for navigating multi-view video using the spatial relationship between camera views — context-aware switching that respects how viewers think about the scene.
CONFERENCE
2016Enhanced Depth Estimation using a Combination of Structured Light Sensing and Stereo Reconstruction★ 6
A Wittmann, A Al-Nuaimi, E Steinbach, G Schroth
VISAPP · Intl. Conf. on Computer Vision Theory and Applications
Combines a low-res structured-light prior with stereo disparity estimation in an α-expansion loop — denser depth maps, smaller search ranges, faster runtimes.

WORKSHOP
2013Towards location recognition using range images★ 6
A Al-Nuaimi, R Huitl, S Taifour, S Sarin, X Song, YX Gu, E Steinbach, M Fahrmair
IEEE ICME Workshops (ICMEW)
Adapts content-based image retrieval to range images for indoor localization. Benchmarks NARF against appearance features on a challenging indoor dataset.
WORKSHOP
2012ConCor+: Robust and confident video synchronization using consensus-based cross-correlation★ 5
A Al-Nuaimi, B Cizmeci, F Schweiger, R Katz, S Taifour, E Steinbach
IEEE 14th Intl. Workshop on Multimedia Signal Processing (MMSP)
Extends the bitrate-based video sync with a consensus-driven cross-correlation that survives dropouts and noise — and emits a confidence score, so you can reject untrustworthy alignments instead of silently shipping them.
PATENT
2019Visual localization method★ 5
M Abu-Alqumsan, A Al-Nuaimi, R Huitl, G Schroth, F Schweiger
US Patent 10,229,136
Continuation in the visual localization patent family — refines and extends the claim set around the mobile place-recognition pipeline first granted as US 9,641,981.
JOURNAL
20176DOF decoupled roto-translation alignment of large-scale indoor point clouds★ 4
A Al-Nuaimi, S Hilsenbeck, A Garcea, E Steinbach
Computer Vision and Image Understanding (CVIU) · Elsevier
A scalable alignment method for large indoor point clouds: decouple rotation from translation, solve each in a smaller search space, then refine jointly. Faster and more robust than coupled 6-DOF search.
PATENT
2018Visual localization method★ 3
M Abu-Alqumsan, A Al-Nuaimi, R Huitl, G Schroth, F Schweiger
US Patent 9,946,733
Continuation in the visual localization patent family — carves out a distinct claim scope from US 9,641,981.
PATENT
2023Visual localization method★ 1
M Abu-Alqumsan, A Al-Nuaimi, R Huitl, G Schroth, F Schweiger
US Patent 11,803,586
Latest continuation in the visual localization patent family — extends the original 2017 disclosure into a fresh claim set granted six years later.
anas@fanar:~$ git log --oneline --all --repos
[!] disclaimer: most of the code I write lives behind corporate firewalls and is highly protected — there is little public code to show here. The list below is what GitHub exposes; the real work is elsewhere.
loading...
anas@fanar:~$ curl -s https://medium.com/@anas.alnuaimi/feed | xmllint --xpath '//item' -
loading...
anas@fanar:~$ ./contact.sh
[+] resolving channels... [+] handshake established. you have 4 vectors: ┌─ email → analnuaimi@hbku.edu.qa ├─ github → @TUMAAA ├─ linkedin → /in/anasaa └─ medium → @anas.alnuaimi [✓] ready for incoming packets.
anas@fanar:~$ ▌